Ķīnas alumīnija Yun Copper Pulangas vara raktuves, kas atrodas Shangri-La apgabalā, Diqing Tibetas autonomajā prefektūrā, Juņnaņas provincē, 3600–4500 m augstumā, un tās ieguves apjoms ir 12,5 miljoni tonnu, izmantojot dabisko drupu ieguves metodi.
2016. gada aprīlī Soly veiksmīgi uzvarēja iepirkuma konkursā par bezvadītāja transporta sistēmas projektu ieguves un pārstrādes projekta pirmajai fāzei Yunnan Pulang vara raktuvēs.Projekts ietver EPC pabeigtu līgumu par 3660 kāpurķēžu transporta horizontālo elektrisko lokomotīvju, rūdas vagonu, izkraušanas staciju un atbalsta piedziņas bloku, elektrisko, automatizācijas, sliežu ceļu ieklāšanas un montāžas projektēšanu, iepirkumu un būvniecību.
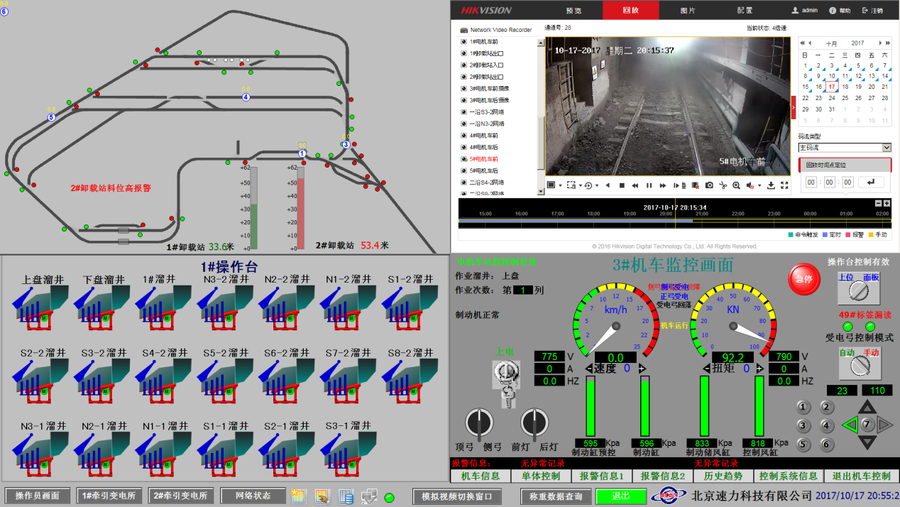
Pulang Copper Mine pazemes dzelzceļa transporta automātiskā darbības sistēma kontrolē visu procesa plūsmu, sākot no datu vākšanas teknes šahtā, rūdas iekraušanas ar vibrācijas izlādētājiem, automātisku galvenās transporta joslas darbību līdz rūdas izkraušanai izkraušanas stacijā, un tā ir saistīta. drupināšanai un pacelšanai.Sistēma integrē un apvieno datus no saistītajām sistēmām, tostarp drupināšanas un pacelšanas, un galu galā apvieno vairākas darbstacijas dispečera priekšā, nodrošinot dispečeram pilnīgu priekšstatu par pazemes ražošanu centralizētai ražošanas plānošanai.Tajā pašā laikā sistēma ievēro stabilas rūdas pakāpes principu, un atbilstoši rūdas daudzumam un pakāpei ieguves apgabala teknē, inteliģentai rūdas sadalei un nosūtīšanai sistēma automātiski piešķir vilcienus iepriekš noteiktai ieguves apgabala teknei iekraušanai.Lokomotīve automātiski brauc uz izkraušanas staciju, lai pabeigtu izkraušanu saskaņā ar sistēmas norādījumiem, un pēc tam brauc uz norādīto iekraušanas tekni nākamajam ciklam saskaņā ar sistēmas norādījumiem.Lokomotīves automātiskās darbības laikā sistēmas darbstacija reāllaikā parāda lokomotīves kustības pozīciju un uzraudzības datus, savukārt sistēma var izvadīt pielāgotus ziņojumus atbilstoši lietotāja prasībām.
Sistēmas funkcijas
Saprātīga rūdas proporcija.
Elektriskās lokomotīves autonoma darbība.
Attālināta mīnu iekraušana.
Precīza transportlīdzekļa atrašanās vieta reāllaikā
Sliežu ceļa signalizācijas sistēmu automātiskā vadība.
Sadursmes aizsardzība mehāniskajiem transportlīdzekļiem.
Automašīnas virsbūves bojājumu aizsardzība.
Vēsturiskās mehānisko transportlīdzekļu trases informācijas atskaņošana.
Mehānisko transportlīdzekļu satiksmes reāllaika displejs viedā platformā.
Operatīvo datu reģistrēšana, atskaišu izstrāde pēc pasūtījuma.
Šis projekts ir veiksmīgi pavēris jaunu Soly produktu izstrādes, pielietojuma un mārketinga režīma ēru, kam ir tālejoša stratēģiska nozīme uzņēmuma turpmākajā biznesa attīstībā;nākotnē Soly turpinās uzņemties "viedo raktuvju būvi" kā savu atbildību un nenogurstoši strādās, lai izveidotu "starptautiski progresīvas, vietējās pirmās klases" raktuves.